執筆者の偏見によるロボット紹介
各ロボットの大まかな説明。
 ロボット名 ξ
ロボット名 ξ
チーム名 京大機械研-λ
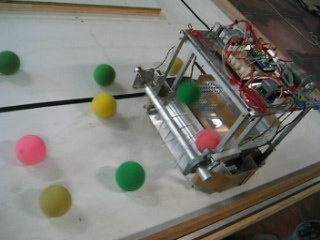
写真は寮食での試走の様子。
4人のチームで製作したロボットです。ボールを取り込むためのローラーが釘バットみたいになっていて、凶悪そうでいいかんじです。
言われてもそうは見えませんが、実は鹿型だそうで、本番では鹿の飾りつけがされました。
滑らかに加減速しながら走行できます。
 ロボット名 ソルティドッグ
ロボット名 ソルティドッグ
チーム名 京大機械研-ε
これも寮食での試走の様子。
5人のチームで製作しました。ボールを取り込むためのローラーにトイレットペーパーを使っているのが上のロボットと対照的です。
制作期間が短かったにもかかわらず、ボールの色識別のためのセンサーを搭載することができました。
ボールを分別してゴールに入れることで、高得点を狙います。
 ロボット名 OneDog
ロボット名 OneDog
個人出場
ちゃんとした写真を用意しなかったので、不鮮明なものになってしまいました。
ステッピングモータを使っているのに動きが不正確かつ滑らかです。
ファンでボールを吸いつけて1個ずつ運びます。
 ロボット名 白鋼のΩ
ロボット名 白鋼のΩ
チーム名 Project Ω (個人出場)
きれいな写真がありました。
機械研のロボットにしては珍しくボディに外装がついていたり、走行状態によって(?)目の色が変わったりして格好いいです。
触手でボールをつかみ、色によって分別してゴールに運びます。
 ロボット名 風兎2005
ロボット名 風兎2005
個人出場
写真は超アップです。
機械研OBによる製作です。アームの先についているファンでボールを吸いつけ、アームを動かしながらボールを放すことで、ボールを投げたり転がしたりできます。
小型で多彩な動きをするなロボットです。