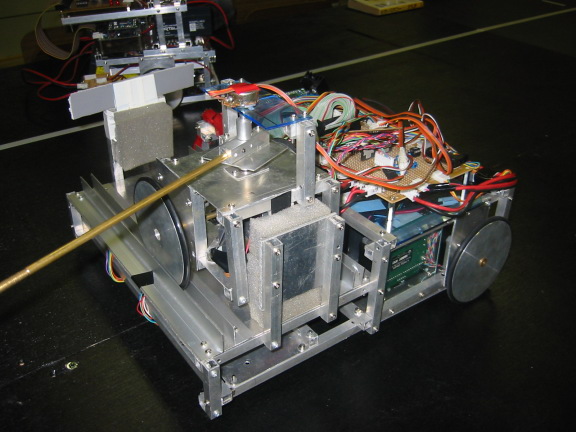
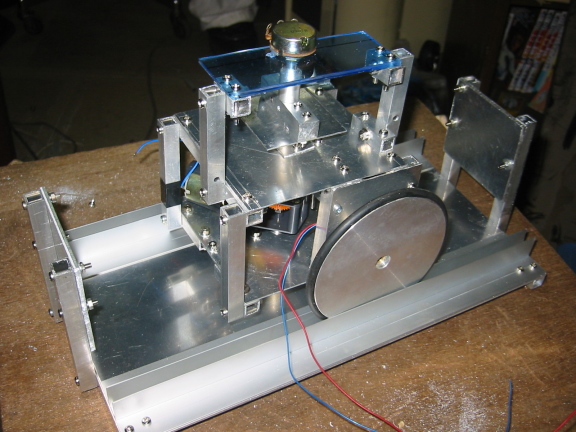
とにかくでかいです。ロボットランサーの大会のルール上、スピードを優先させなくてはならないにもかかわらずでかいです。たぶん大会内で最重量だと思います。見た目もかなりごつくて、頑丈です。練習中に、60cmぐらいの高さから2回落ちました。しかし、なんとか大会に無事でることができました。
本体部分には車輪とラインセンサーがついており、その上に子機(ランサー部分)がのっています。今回、本体の上に子機がのっているという構造にした上に、メンテナンスをしやすいように設計したため、全体として大きくなってしまいかなりの重量になってしまいました。それにも関わらずモーターは結構小振りなステッピングモーターを使っています。大会に出場していたロボットの大半がDCモーターを使っていましたが、ステッピングモーターは制御しやすいためウチのチームはこのモーターを選びました。しかしステッピングモーターはあまりスピードが出せないため、ロボットはあまり速く走ることができませんでした。
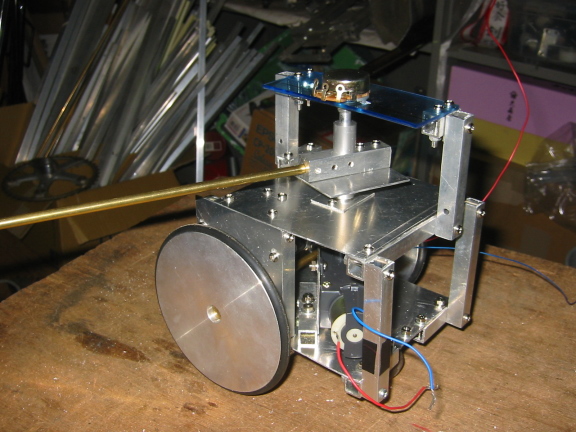
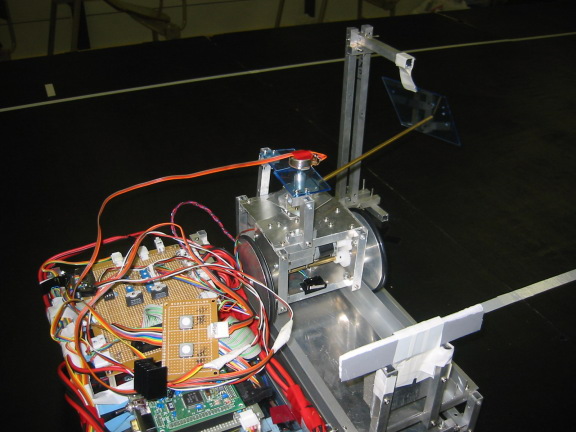
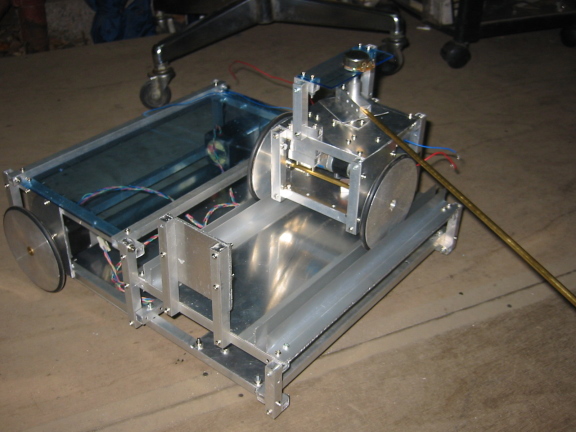
ランサー部分の機構は他のチームに比べるとかなり特殊だといえます。このロボットのランサー部分は本体と完全に分離した子機のようになっています。この子機にはDCモーターによって動く車輪がついており、その子機は本体に敷かれたレール上を走ることが出来ます。さらに、この子機についている槍は180度回転することが出来るようになっています。この子機によって槍は平行移動しながら回転も出来るような機構となっています。
ラインセンサーはライントレース用に横一列に並べた5個のセンサーと、的の直前に設置されているマーカーの読みとり用に左右1個ずつの計7個を装備させました。このロボットランサーの大会出場において一番苦労したのが5つのラインセンサーによるライントレースプログラムの作成でした。