
第17回知能ロボコン(@2005)に出場したマシン、"白鋼のΩ(シロガネノオーム)"の紹介。機体前面にロボットアームを1つ備えた、対向2輪式の自律型移動ロボットです。RCサーボを使わず、包むようにボールを運ぶアーム機構と、曲線を多用したデザインが特徴です。
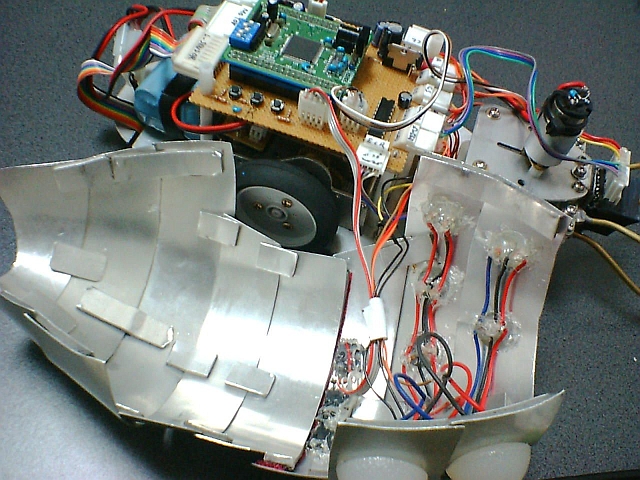
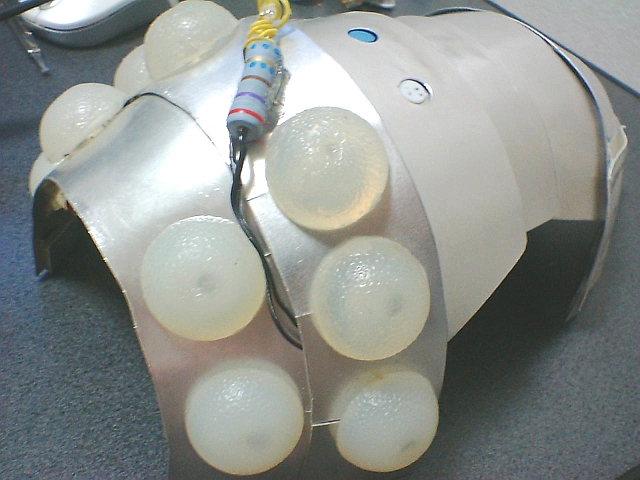
筐体はt0.5のアルミ板、目玉はゼリーの空き容器に熱軟化式の接着剤(ホットボンド)を流し込み、LEDを埋め込んで作りました。"Ωの幼生"のつもりで付けているのは金被抵抗で、LEDの電流制限抵抗として回路の一部に組み込まれています。
『アルミ板の曲線はどうやって作ったんですか?』と良く聞かれますが、両手で持ってえいやっと曲げてあるだけです。くにくにやっているうちに、程よい曲線に仕上がります。
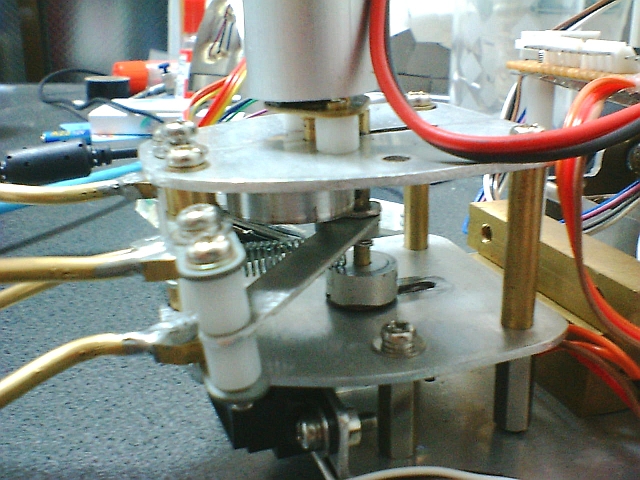
このマシンのこだわりの一つ、「RCサーボを使わない」を実現する為に、カム機構とスライダクランク機構を用いてモータ1個で動いています。DCギアドモータに直付けしたカム(ただの偏心円盤)が、アームを拡げる向きにのみフォロア(=スライダクランクのスライダ)を押し、閉じる向きには巻きバネで引いています。よって、ボールを運ぶ間はモータが力を出す必要はありません。
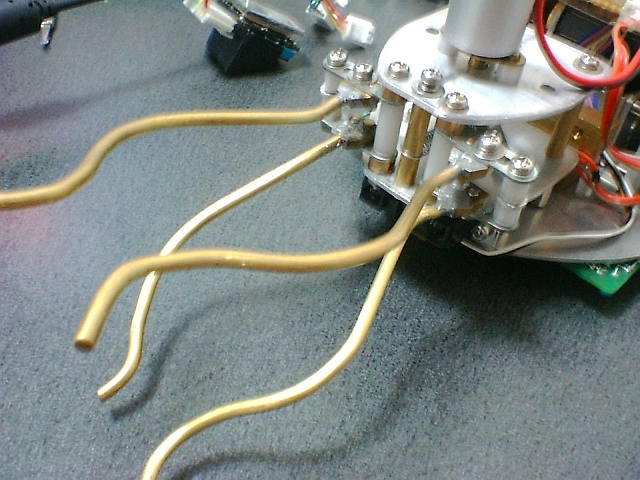
ボールをつかむ部分の"触手"はφ3黄銅の棒材を湾曲させて作りました。流石に万力とペンチを使いましたが、外装と同じく手作業で曲げています。根元の部分は卓上フライスで削り出し、触手本体とは半田でロウ接しました。ネジ一本で留まっている様に見えますが、すぐ横の穴に合うように小さな突起が出ていて、ズレを防いでいます。
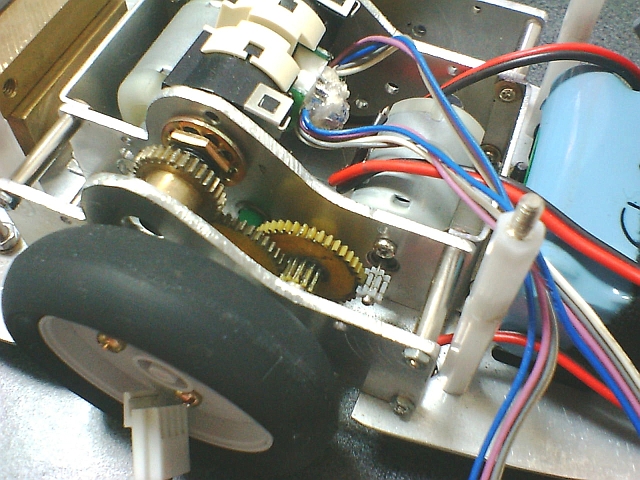
最初はタミヤのツインモータギアボックスを使用していましたが、剛性不足とエンコーダ搭載の要求からギアボックスを自作しました。マブチの家電用DCモーターFC280SAをタミヤのプラギアで16:1程に減速して使用しています。タイヤは同じくタミヤのナロータイヤセット。回転量を測るために岩通のロータリエンコーダ(100ppr)を組み込んでいます。
ギアボックスの自作は精度的に厳しいか?と敬遠していましたが、手でポンチ打ち+ボール盤程度の加工で作った物でも、問題なく動いてくれている感じです。
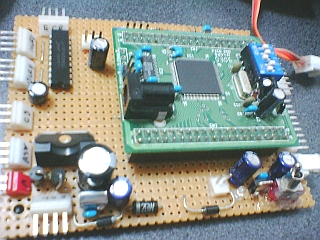
マイコンボードは、2005年現在京大機械研で標準品として使われているAKI-H8/3069です。他に電源用IC・アーム用のモータドライバ・LED駆動用のトランジスタアレイ等が乗っています。

東芝のモータドライバIC TA8440H(2個)を中心に、周辺回路をまとめています。このICはPWM駆動標準対応の為デットタイム云々を気にする必要が無く、電流もそこそこ流せるので、回路が苦手な自分にとっては気軽に使えて重宝しました。
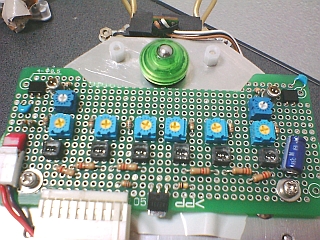
安価なフォトリフレクタGP2S05を6個並べて、路面の明暗を見る為のアナログセンサとして使っています。外乱光の影響を多分に受けますが、LED点灯時と消灯時の差を見ることで何とか読めていました。両端には、ラインセンサに先行してフィールド上の横線を読むために、デジタル出力のセンサIC・S7136を付けています。

センシング素子としては、明るさを見るためのCdSが1個ついているだけです。ボールに押し付けた状態で青・黄・赤のLEDを順次点灯させ、それぞれの場合の反射光の強さを見ています。下部のICは出力増幅用のOPアンプ、LMC662CN。800円程度の便利なカラーセンサモジュールも手に入ったのですが、『教科書に出てくるOPアンプとかCdSとか、一度くらい使ってみたいなぁ』という理由で自作してみました。
この他、機体前面にPSD距離センサGP2D12がついています。
直進・その場旋回・ライントレースの組み合わせで動いています。約1msec周期のタイマ割込みで、エンコーダの値の読み込み・ライン位置の推定・モータへの速度指示などを行っています。並進成分・回転成分それぞれに対してPID(又はPD)制御を行っています。重心位置が後輪にかなり近い為、急加速をするとウィリー状態になるので、制御ループの中に加速度を制限するようなリミッタが入っています。
判別したボールの色に応じて、緑ボールなら目が青く、赤ボールなら赤く光ります。黄ボールなら幼生の触手が黄色く光ります。また、走行時は低速(500mm/s以下)を指示した場合には目が青く、高速を指示した場合には目が赤くなるようになっています。
センサの不調とソフトの作り込みの甘さから、1次予選・敗者復活戦とも自由ボールのみでしたが、審査員推薦枠を頂いて2日目に進出しました。2次予選ではなんとか8点とりましたが、そこまで。
そんなわけでろくな点数を取れなかったのですが、運良く"メカトロで遊ぶ会賞"を受賞、『ロボットは見た目も大切。』とのコメントを添えていただきました。
今回、初めてロボットを丸ごと1台独りで作ったのですが、技術的にもモチベーション的にも、やはりチームで製作しておいた方が良かったかと思います。特に、ソフトウェアに関しては興味が薄かったこともあり、十分煮詰められないまま本番となってしまいました。やはり、ガワ屋はガワを作っているのが一番のようです。
大会では、様々なロボットを見ることができ、大変楽しませてもらいました。基本技術が浸透してきたせいか、改めて個性を主張する方へロボットの傾向がシフトしてきているのかな、という印象を受けました。今後も楽しい大会として続いていって欲しいです。