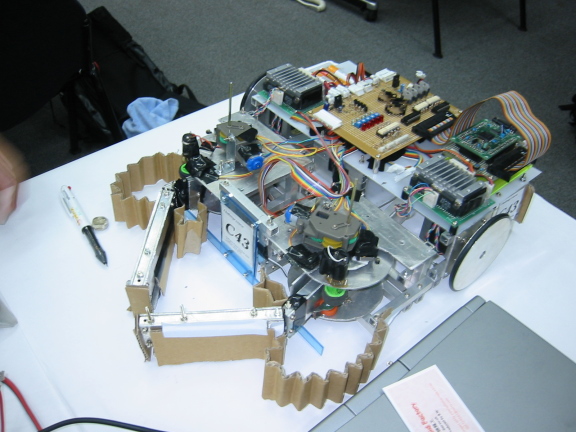
まず、前方に二本のアームがついています。これによって見た目がクワガタ虫に近くなったことから、クワガタ虫を英語にして「STAG BEETLE」と名付けました。後ろの部分には回路及び電池がのっています。まわりについているダンボールはボールをかき集める時に車体の下にボールが潜り込むのを防ぐ役割をしてます。実は車体の下にボールが潜り込むという欠点は大会直前に気がついたので、急きょつけられたのでこんなことになってます。
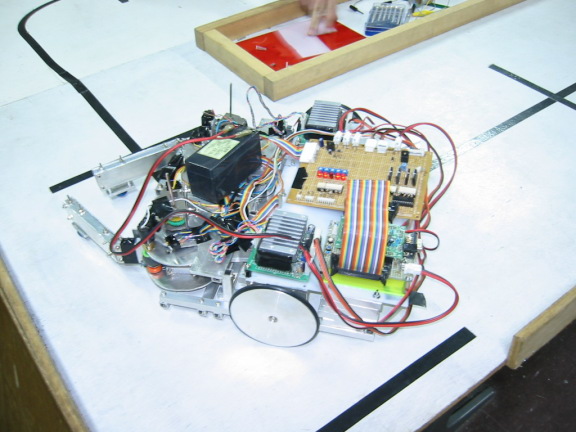
本体部分には車輪とラインセンサー、アームがついています。動力にはステッピングモーターを使いました。大会当日では、練習では上手く動いていたはずのステッピングモーターが上手く動かずにロボットが進まなくなってしまい、悔しい思いをさせられました。また、本体のサイズが競技の制限サイズをオーバーしてしまっていたため、真ん中の余計な余白部分を切り取ってつなぎ直すという大技も使われました。
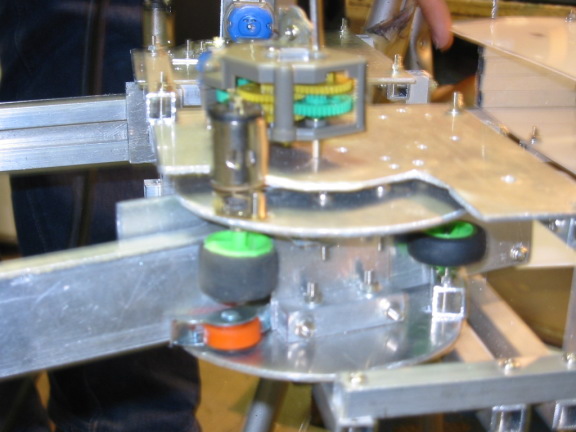
前方のアームが伸び、開き、そのまま直進することによってボールをかき集め、その後閉じることによってボールを確保する、という構造になってます。アームを伸ばすのに、タイヤを回転させてその摩擦によって伸ばす、という仕組みにしたわけですが、この摩擦の微妙な調整に地獄を見せられました。回転機構のほうも、軸にベアリングを通すなどのことを一切していなかったため、回ったり回らなかったりと苦労させられました。あと、アームが伸びきった、開ききったなどを感知するためにマイクロスイッチをつけたのですが、何故かスイッチが入っても無反応だったため、スイッチ無しで、適当な時間だけ動かすということで対処しました。なんというかアーム部分は「STAG BEETLE」のメイン機能であると共に最大の欠点でもありました・・・。
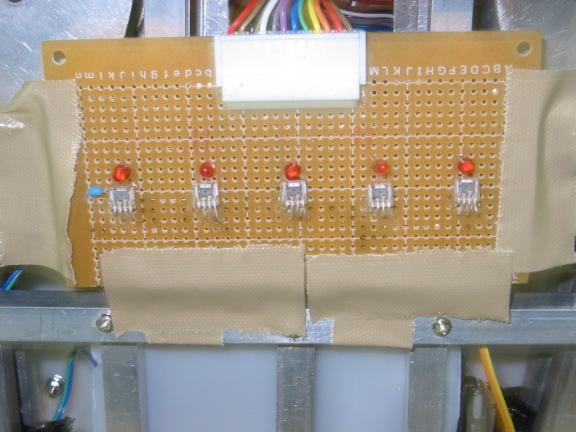
ラインセンサーはライントレース用に5個のセンサーを横一列に配置しました。あまりスピードを出さずに進行させたので、ライントレースはわりと上手く行きました。